ESP8266 Thiết bị chấp hành có phản hồi
Trong một bài hướng dẫn trước, chúng ta đã thảo luận về ESP8266 - Bộ truyền động. Bài hướng dẫn này sẽ giới thiệu cho bạn về động cơ tuyến tính có phản hồi (còn được gọi là động cơ tuyến tính có phản hồi). Loại động cơ tuyến tính này cung cấp thông tin để xác định vị trí của hành trình của nó và điều khiển nó. Cụ thể, chúng ta sẽ học được:
- Cơ chế hoạt động của một động cơ tuyến tính có phản hồi
- Cách xác định vị trí của động cơ tuyến tính có phản hồi (bằng milimet)
- Cách điều khiển vị trí của một động cơ tuyến tính
Phần cứng cần chuẩn bị
| 1 | × | ESP8266 NodeMCU ESP-12F | Amazon | |
| 1 | × | Alternatively, ESP8266 D1 Mini NodeMCU ESP-12F | Amazon | |
| 1 | × | Micro USB Cable | Amazon | |
| 1 | × | Alternatively, ESP8266 NodeMCU ESP-12E (Uno-form) | Amazon | |
| 1 | × | USB Cable Type-A to Type-C (for USB-A PC) | Amazon | |
| 1 | × | USB Cable Type-C to Type-C (for USB-C PC) | Amazon | |
| 1 | × | 12V Linear Feedback Actuator | Amazon | |
| 1 | × | L298N Motor Driver Module | Amazon | |
| 1 | × | 12V Power Adapter | Amazon | |
| 1 | × | DC Power Jack | Amazon | |
| 1 | × | dây jumper | Amazon | |
| 1 | × | (Khuyến nghị) Screw Terminal Expansion Board for ESP8266 | Amazon |
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (18 sensors/displays) | Amazon |
Giới thiệu về Bộ truyền động tuyến tính có hồi tiếp
Một động cơ chấp hành tuyến tính có hồi tiếp là một thiết bị có tín hiệu nhằm xác định vị trí của nó và điều khiển nó. Một biến trở được sử dụng để tạo ra giá trị điện áp tương ứng với vị trí của hành trình làm tín hiệu hồi tiếp.
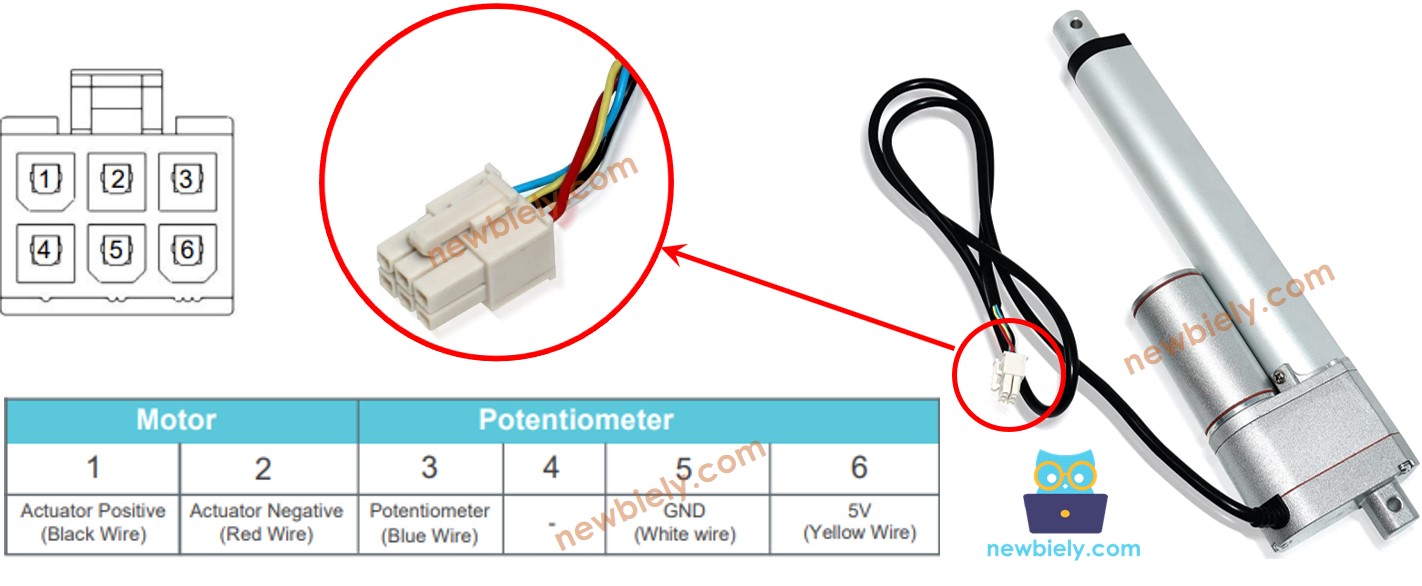
Sơ đồ chân của động cơ tuyến tính có phản hồi
Một bộ truyền động tuyến tính có phản hồi có 5 dây:
- Dây dương của động cơ tuyến tính: Dây này được dùng để điều khiển động cơ tuyến tính bằng cách áp dụng điện áp cao (12V, 24V, 48V...).
- Dây âm của động cơ tuyến tính: Dây này được dùng để điều khiển động cơ tuyến tính bằng cách áp dụng điện áp cao (12V, 24V, 48V...).
- Dây 5V: dây này dùng cho biến trở phản hồi. Nó nên được kết nối với 5V hoặc 3.3V
- Dây GND: dây này dùng cho biến trở phản hồi. Nó nên được kết nối với GND
- Dây biến trở: (còn được gọi là dây phản hồi, hoặc dây đầu ra) dây này cấp ra giá trị điện áp tương ứng với vị trí của hành trình.
Cách hoạt động
Nếu chúng ta cấp điện áp cao cho dây dương và dây âm, hành trình của bộ truyền động sẽ được kéo dài hoặc rút lại. Cụ thể:
- Nếu 12V (12V, 24V, 48V...) được kết nối vào dây dương và GND được kết nối vào dây âm, bộ truyền động tuyến tính sẽ mở rộng với vận tốc tối đa cho đến khi đạt tới giới hạn.
- Nếu 12V (12V, 24V, 48V...) được kết nối vào dây âm và GND được kết nối vào dây dương, bộ truyền động tuyến tính sẽ rút với vận tốc tối đa cho đến khi đạt tới giới hạn.
- Nếu nguồn điện bị ngắt cho bộ truyền động (GND được kết nối với cả dây dương và dây âm), bộ truyền động sẽ ngừng mở rộng và rút lại.
※ Lưu ý:
- Điện áp cần thiết để vận hành bộ truyền động được xác định bởi thông số kỹ thuật của nó. Để biết điện áp chính xác, hãy tham khảo bảng đặc tính hoặc hướng dẫn sử dụng.
- Ngay cả khi nguồn điện đã tắt, bộ truyền động vẫn có thể duy trì vị trí của nó khi chịu một tải trọng.
Điện áp trên dây biến trở liên quan trực tiếp đến vị trí hành trình của bộ truyền động. Bằng cách đo điện áp này, chúng ta có thể xác định vị trí hành trình.
Sơ đồ đấu dây
Hãy tháo hết ba jumper khỏi mô-đun L298N trước khi kết nối dây.
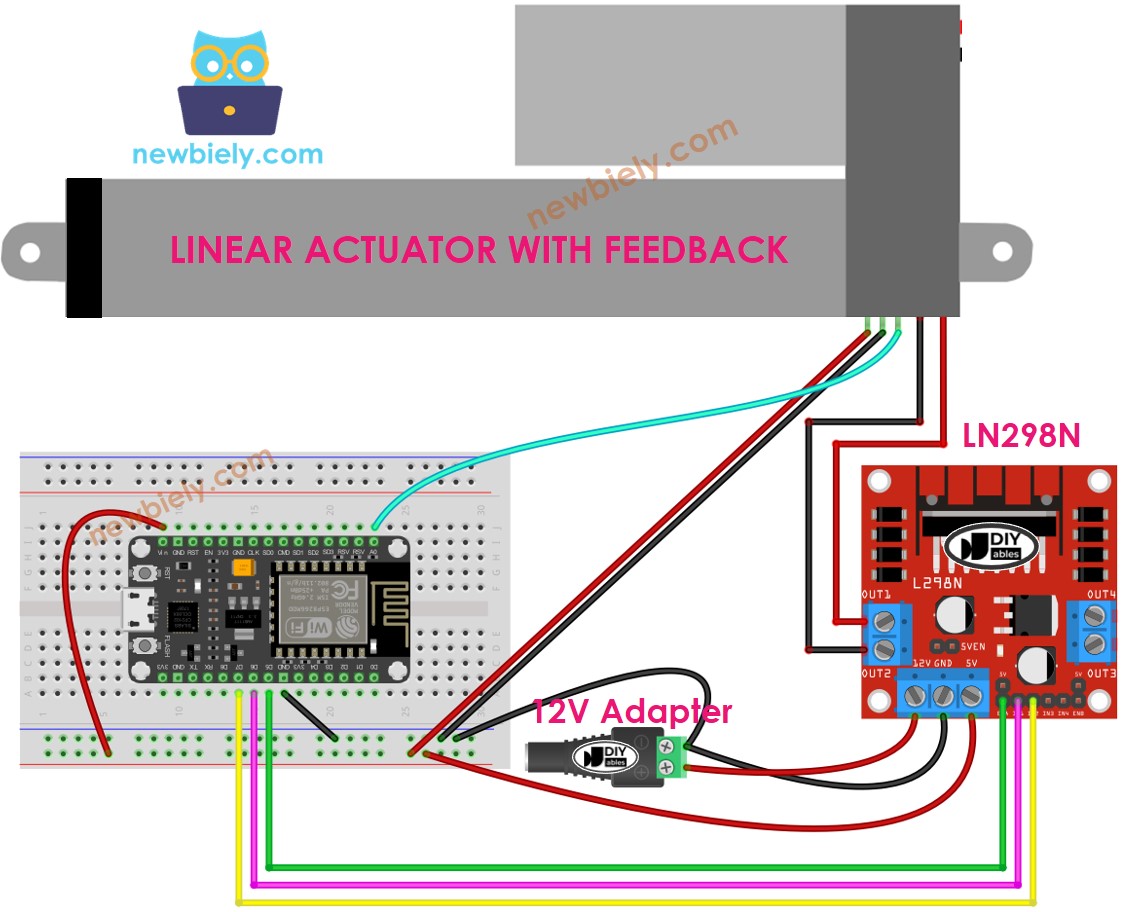
This image is created using Fritzing. Click to enlarge image
Xem thêm Sơ đồ chân ESP8266 và Cách cấp nguồn cho ESP8266.
Cách điều khiển mở rộng và thu lại một bộ truyền động tuyến tính
Xem hướng dẫn ESP8266 - Bộ truyền động.
Cách xác định vị trí của bộ truyền động tuyến tính
Đây là một hình minh họa về cách xác định hành trình của một động cơ truyền động tuyến tính.
Hiệu chuẩn
- Xác định chiều dài hành trình của bộ truyền động (đơn vị mm) bằng cách đo bằng thước hoặc tham khảo bảng dữ liệu.
- Để xác định các giá trị đầu ra khi bộ truyền động tuyến tính được mở rộng hoàn toàn và thu hồi hoàn toàn, hãy thực thi đoạn mã dưới đây.
- Bạn sẽ quan sát nhật ký trên Serial Monitor, như được minh họa trong ví dụ dưới đây
Ghi lại ba giá trị trong mã dưới đây. Nếu giá trị tối thiểu và giá trị tối đa bị đảo ngược, hãy đổi chỗ IN1_PIN và IN2_PIN.
Ghi chú ba giá trị trong đoạn mã dưới đây. Nếu giá trị tối thiểu và tối đa bị tráo đổi, hãy hoán đổi IN1_PIN và IN2_PIN.
Mã ESP8266 để tính vị trí của bộ truyền động
- Cập nhật mã với ba giá trị đã được hiệu chuẩn.
- Tải mã lên ESP8266.
- Xem kết quả trên Serial Monitor.
Cách điều khiển động cơ chấp hành tuyến tính đến một vị trí xác định
Video Tutorial
Việc sản xuất video tốn rất nhiều thời gian. Nếu video hướng dẫn hữu ích cho việc học của bạn, hãy đăng ký kênh YouTube để ủng hộ. Nếu nhu cầu đủ cao, chúng tôi sẽ cố gắng làm thêm nhiều video.
Tham chiếu hàm
Bài hướng dẫn liên quan
📱 Ứng dụng đề xuất
 English for KidsHọc tiếng Anh vui nhộn cho trẻ nhỏ.Tải về trênGoogle PlayTải về trênApp Store
English for KidsHọc tiếng Anh vui nhộn cho trẻ nhỏ.Tải về trênGoogle PlayTải về trênApp Store Bubble NoteGhi chú tự xóa — viết như nhắn tin.Tải về trênGoogle PlayTải về trênApp Store
Bubble NoteGhi chú tự xóa — viết như nhắn tin.Tải về trênGoogle PlayTải về trênApp Store Tôi Không MuaĐánh bại mua sắm bốc đồng, tiết kiệm hơn.Tải về trênGoogle PlayTải về trênApp Store
Tôi Không MuaĐánh bại mua sắm bốc đồng, tiết kiệm hơn.Tải về trênGoogle PlayTải về trênApp Store Con Đường Tri ThứcBài thi thử để học mọi thứ.Tải về trênGoogle PlayTải về trênApp Store
Con Đường Tri ThứcBài thi thử để học mọi thứ.Tải về trênGoogle PlayTải về trênApp Store