Arduino UNO R4 Actuator
Khám phá cách sử dụng Arduino Uno R4 để điều khiển actuator tuyến tính trong hướng dẫn dễ hiểu này! Hoàn hảo cho người mới bắt đầu, hướng dẫn này sẽ chỉ cho bạn cách sử dụng driver L298N cho các dự án DIY thú vị. Đây là những gì bạn sẽ học được:
- Actuator tuyến tính là gì và cách nó hoạt động
- Các bước đơn giản để làm cho actuator mở rộng hoặc co lại
- Đấu dây dễ dàng với driver L298N
- Code Arduino rõ ràng để điều khiển actuator
- Cách thay đổi tốc độ của actuator để di chuyển nhanh hơn hoặc chậm hơn
Hướng dẫn này tập trung vào các actuator tuyến tính không có phản hồi. Nếu bạn muốn tìm hiểu về actuator tuyến tính có phản hồi, hãy xem hướng dẫn Arduino UNO R4 - Actuator có Phản Hồi của chúng tôi. Hãy làm theo dự án Arduino dễ dàng này để xây dựng hệ thống tự động hóa thông minh của riêng bạn!
Phần Cứng Cần Thiết
| 1 | × | Arduino UNO R4 WiFi hoặc Arduino UNO R4 Minima | ||
| 1 | × | (Tùy chọn) DIYables STEM V4 IoT, tương thích với Arduino Uno R4 WiFi | Amazon | |
| 1 | × | Arduino UNO R4 Minima (Thay thế) | Amazon | |
| 1 | × | Cáp USB Type-C | Amazon | |
| 1 | × | Linear Actuator | Amazon | |
| 1 | × | Module Driver Motor L298N | Amazon | |
| 1 | × | Adapter Nguồn 12V | Amazon | |
| 1 | × | Jack Nguồn DC | Amazon | |
| 1 | × | Dây Jumper | Amazon | |
| 1 | × | (Khuyến nghị) Screw Terminal Block Shield for Arduino UNO R4 | Amazon | |
| 1 | × | (Khuyến nghị) Sensors/Servo Expansion Shield for Arduino UNO R4 | Amazon | |
| 1 | × | (Khuyến nghị) Breadboard Shield for Arduino UNO R4 | Amazon | |
| 1 | × | (Khuyến nghị) Enclosure for Arduino UNO R4 | Amazon | |
| 1 | × | (Khuyến nghị) Power Splitter for Arduino UNO R4 | Amazon | |
| 1 | × | (Khuyến nghị) Prototyping Base Plate & Breadboard Kit for Arduino UNO | Amazon |
Or you can buy the following kits:
| 1 | × | DIYables STEM V4 IoT Starter Kit (Arduino included) | Amazon | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) | Amazon |
Về Linear Actuator
Sơ Đồ Chân Linear Actuator
Linear actuator đi kèm với hai dây.
- Dây dương: thường có màu đỏ
- Dây âm: thường có màu đen

Cách Hoạt Động
Khi mua linear actuator, điều quan trọng là phải hiểu nó hoạt động ở điện áp nào. Ví dụ, hãy xem xét một linear actuator sử dụng 12 volt.
Khi bạn kết nối linear actuator 12V với nguồn điện 12V:
- Kết nối 12V với dây dương và GND với dây âm: linear actuator sẽ mở rộng hoàn toàn với tốc độ cao cho đến khi dừng lại ở giới hạn của nó.
- Kết nối 12V với dây âm và GND với dây dương: linear actuator sẽ co lại hoàn toàn với tốc độ cao cho đến khi dừng lại ở giới hạn của nó.
Khi bạn cắt nguồn điện cho actuator bằng cách kết nối cả dây dương và âm với đất, actuator sẽ ngừng di chuyển vào hoặc ra.
※ Lưu ý:
Đối với động cơ DC, servo motor và stepper motor không có bánh răng, chúng không thể duy trì vị trí khi tắt nguồn và đang chịu tải. Tuy nhiên, actuator có thể duy trì vị trí ngay cả khi không có nguồn điện khi đang chịu tải.
Nếu chúng ta sử dụng ít hơn 12V cho linear actuator, chúng vẫn hoạt động nhưng không ở tốc độ nhanh nhất. Điều này cho thấy việc thay đổi điện áp nguồn cung cấp có thể điều chỉnh tốc độ của linear actuator. Tuy nhiên, việc điều khiển điện áp một cách chính xác là khó khăn, vì vậy phương pháp này không được sử dụng phổ biến. Thay vào đó, điện áp được giữ không đổi và tốc độ của linear actuator được điều khiển bằng tín hiệu PWM. Khi chu kỳ nhiệm vụ PWM cao hơn, linear actuator di chuyển nhanh hơn.

Cách Điều Khiển Linear Actuator với Arduino Uno R4
Để điều khiển linear actuator, chúng ta thường muốn:
- Làm cho nó mở rộng (di chuyển ra ngoài) với tốc độ tối đa
- Làm cho nó co lại (di chuyển về) với tốc độ tối đa
- (Tùy chọn) Điều khiển tốc độ di chuyển vào hoặc ra
Arduino có thể gửi tín hiệu điều khiển, nhưng những tín hiệu này quá yếu (điện áp và dòng điện thấp) để di chuyển actuator trực tiếp. Đó là lý do tại sao chúng ta cần một driver giữa Arduino và actuator.
Driver thực hiện hai công việc chính:
- Nó tăng cường (khuếch đại) tín hiệu của Arduino để có thể cấp nguồn cho actuator.
- Nó chuyển đổi hướng nguồn điện (bằng cách thay đổi cực tính) dựa trên tín hiệu khác từ Arduino — điều này điều khiển actuator mở rộng hay co lại.
※ Lưu ý:
- Bạn có thể sử dụng hướng dẫn này cho bất kỳ linear actuator nào. Chúng tôi sử dụng linear actuator 12V làm ví dụ.
- Khi sử dụng linear actuator 5V với Arduino UNO R4, mặc dù cả hai đều sử dụng 5V, bạn cần thêm driver. Điều này là do Arduino UNO R4 không thể cung cấp đủ dòng điện cho actuator.
Hướng dẫn này sử dụng driver L298N, nhưng còn có nhiều chip và module khác như L293D cũng có thể điều khiển linear actuator.
Về L298N Driver
L298N Driver có thể điều khiển các thiết bị như linear actuator, động cơ DC và stepper motor. Trong hướng dẫn này, chúng tôi sẽ chỉ ra cách sử dụng nó để điều khiển linear actuator.
Sơ Đồ Chân L298N Driver
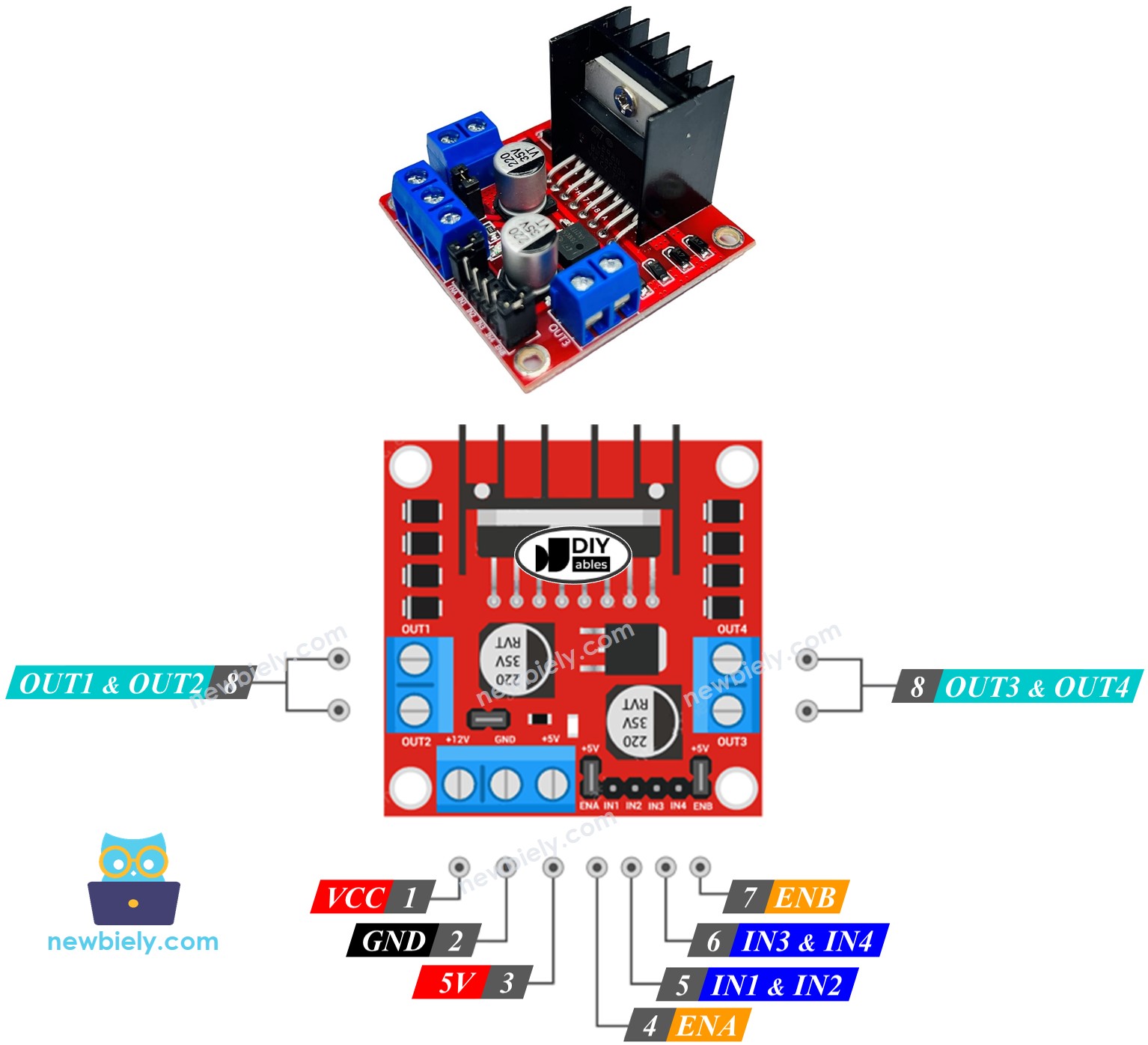
L298N Driver có hai kênh riêng biệt, được gọi là kênh A và kênh B. Thiết lập này cho phép L298N Driver quản lý hai linear actuator khác nhau một cách độc lập và đồng thời. Giả sử linear actuator A được liên kết với kênh A và linear actuator B với kênh B. L298N Driver có 13 chân.
Các chân chung cho cả hai kênh:
- Chân VCC: cung cấp nguồn cho linear actuator. Nó chấp nhận dải từ 5 đến 35V.
- Chân GND: làm đất chung và nên được kết nối với GND (0V).
- Chân 5V: cấp nguồn cho module L298N. Bạn có thể sử dụng 5V từ Arduino UNO R4 cho việc này.
Các chân kênh A:
- Chân ENA: giúp quản lý tốc độ di chuyển của linear actuator A. Nếu bạn ngắt kết nối jumper và liên kết chân này với đầu vào PWM, bạn có thể điều chỉnh tốc độ mở rộng hoặc co lại.
- Chân IN1 & IN2: xác định hướng di chuyển của linear actuator. Nếu một chân là HIGH và chân kia là LOW, actuator sẽ mở rộng hoặc co lại. Nếu cả hai đều HIGH hoặc cả hai đều LOW, actuator sẽ ngừng di chuyển.
- Chân OUT1 & OUT2: được liên kết với linear actuator A.
Các chân kênh B:
- Chân ENB: Những chân này điều chỉnh tốc độ của linear actuator B. Ngắt kết nối jumper và sử dụng đầu vào PWM với chân này để điều khiển tốc độ mở rộng hoặc co lại của linear actuator B.
- Chân IN3 & IN4: Những chân này xác định hướng di chuyển của linear actuator. Nếu một chân là HIGH và chân kia là LOW, linear actuator sẽ mở rộng hoặc co lại. Nếu cả hai chân đều HIGH hoặc LOW, linear actuator sẽ dừng.
- Chân OUT3 & OUT4: Những chân này được kết nối với linear actuator.
L298N driver có hai loại nguồn đầu vào:
- Một cho linear actuator (chân VCC và GND): từ 5 đến 35V.
- Một cho hoạt động nội bộ của module L298N (chân 5V và GND): từ 5 đến 7V.
L298N driver đi kèm với ba jumper cho các mục đích sử dụng đặc biệt hoặc khác nhau. Để đơn giản, vui lòng tháo tất cả jumper khỏi L298N driver.
Chúng ta có thể quản lý hai linear actuator một cách độc lập và đồng thời bằng cách sử dụng Arduino UNO R4 và L298N Driver. Để vận hành mỗi linear actuator, chúng ta chỉ cần ba chân từ Arduino UNO R4.
※ Lưu ý:
Phần này của hướng dẫn chỉ ra cách sử dụng kênh A để điều khiển linear actuator. Điều khiển linear actuator khác hoạt động theo cách tương tự.
Cách Điều Khiển Linear Actuator
Chúng ta sẽ học cách sử dụng L298N driver để điều khiển Linear Actuator.
Sơ Đồ Đấu Dây
Trước khi bắt đầu đấu dây, hãy tháo tất cả ba jumper khỏi module L298N.
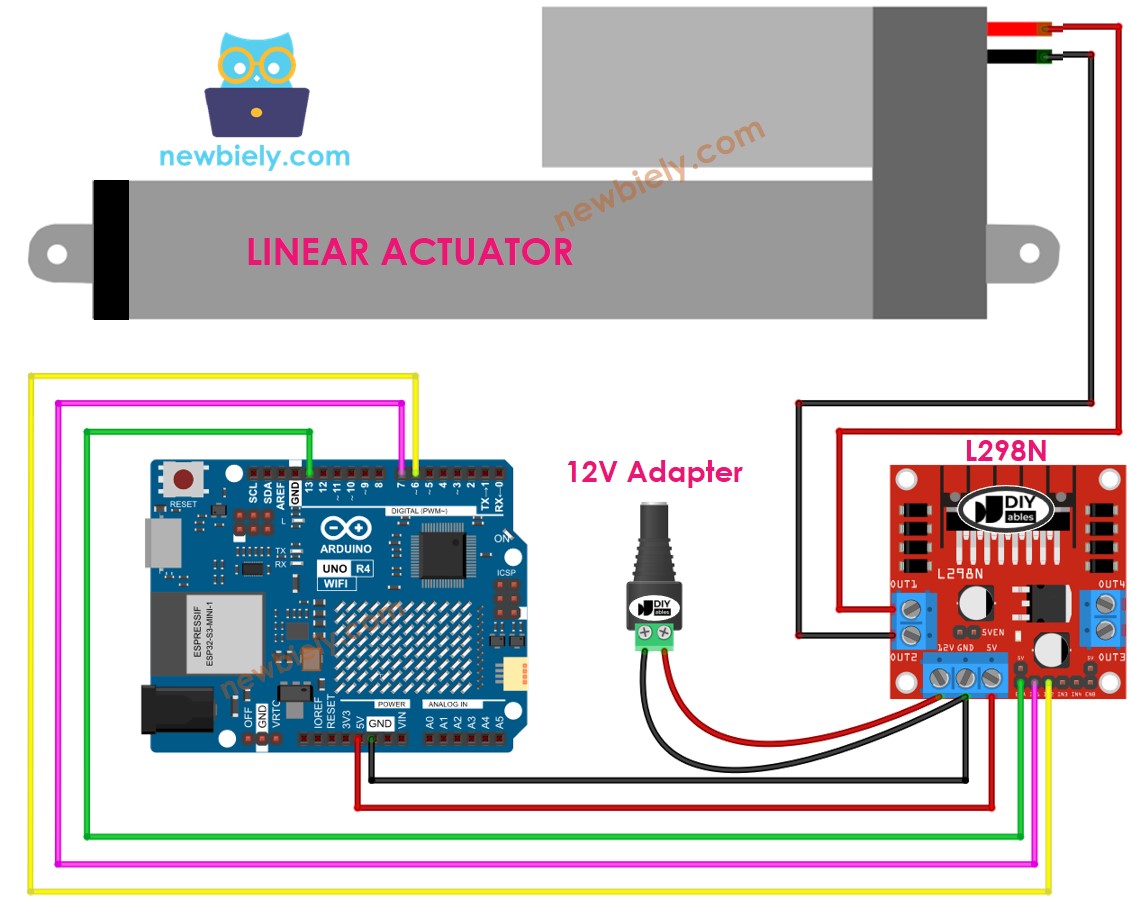
This image is created using Fritzing. Click to enlarge image
Cách Làm Linear Actuator Mở Rộng/Co Lại
Bạn có thể điều khiển hướng của Linear Actuator bằng cách đặt các chân IN1 và IN2 thành HIGH hoặc LOW. Bảng dưới đây cho biết cách thực hiện điều này cho cả hai kênh.
| Chân IN1 | Chân IN2 | Hướng |
|---|---|---|
| LOW | LOW | Linear Actuator A dừng |
| HIGH | HIGH | Linear Actuator A dừng |
| HIGH | LOW | Linear Actuator A mở rộng |
| LOW | HIGH | Linear Actuator A co lại |
- Mở rộng Linear Actuator A
- Linear actuator A co lại.
※ Lưu ý:
Nếu các chân OUT1 và OUT2 được kết nối với linear actuator không đúng, hướng sẽ bị đảo ngược. Để khắc phục điều này, chỉ cần hoán đổi vị trí của các chân OUT1 và OUT2 hoặc thay đổi tín hiệu điều khiển trên các chân IN1 và IN2 trong chương trình.
Cách Dừng Linear Actuator Khỏi Mở Rộng Hoặc Co Lại
Linear actuator ngừng di chuyển ra hoặc vào tự động khi nó đến điểm tối đa hoặc tối thiểu. Chúng ta cũng có thể đặt nó dừng di chuyển trước khi đạt đến những điểm này.
Có hai phương pháp để dừng linear actuator.
- Đặt tốc độ về không
- Đặt các chân IN1 và IN2 về cùng mức (LOW hoặc HIGH).
- Hoặc
Cách Điều Khiển Tốc Độ Linear Actuator qua L298N Driver
Để dễ dàng điều chỉnh tốc độ của linear actuator, sử dụng tín hiệu PWM trên chân ENA thay vì đặt nó thành HIGH. Đây là cách bạn có thể thực hiện:
- Kết nối chân Arduino UNO R4 với chân ENA trên module L298N.
- Sử dụng hàm analogWrite() để gửi tín hiệu PWM đến chân ENA. L298N driver sẽ tăng cường tín hiệu này để điều khiển linear actuator.
Tốc độ có thể là bất kỳ số nào từ 0 đến 255. Ở tốc độ 0, linear actuator sẽ dừng. Ở tốc độ 255, nó di chuyển với tốc độ nhanh nhất.
Code Ví Dụ Arduino UNO R4
Code này thực hiện các nhiệm vụ sau:
- Di chuyển actuator ra ngoài nhanh nhất có thể
- Dừng actuator
- Di chuyển actuator vào trong nhanh nhất có thể
- Dừng actuator
Các Bước Nhanh
Làm theo hướng dẫn từng bước:
- Nếu đây là lần đầu tiên bạn sử dụng Arduino Uno R4 WiFi/Minima, hãy tham khảo hướng dẫn về Arduino UNO R4 - Cài Đặt Phần Mềm.
- Đấu dây các linh kiện theo sơ đồ được cung cấp.
- Kết nối board Arduino Uno R4 với máy tính của bạn bằng cáp USB.
- Khởi chạy Arduino IDE trên máy tính của bạn.
- Chọn board Arduino Uno R4 phù hợp (ví dụ: Arduino Uno R4 WiFi) và cổng COM.
- Tháo tất cả ba jumper khỏi module L298N.
- Dán code vào Arduino IDE.
- Nhấn nút Upload trong Arduino IDE để chuyển code lên Arduino UNO R4.
- Quan sát những điều sau:
- Linear actuator mở rộng và dừng khi đạt giới hạn.
- Linear actuator giữ vị trí trong một khoảng thời gian.
- Linear actuator co lại và dừng khi đạt giới hạn.
- Linear actuator giữ vị trí trong một khoảng thời gian.
- Trình tự này lặp lại liên tục.
Video Tutorial
Việc sản xuất video tốn rất nhiều thời gian. Nếu video hướng dẫn hữu ích cho việc học của bạn, hãy đăng ký kênh YouTube để ủng hộ. Nếu nhu cầu đủ cao, chúng tôi sẽ cố gắng làm thêm nhiều video.
Tóm Tắt
Trong hướng dẫn Arduino UNO R4 này, bạn đã học cách điều khiển linear actuator với L298N driver cho tự động hóa DIY. Hướng dẫn dễ hiểu này đã chỉ cho bạn cách làm cho actuator di chuyển vào và ra, đấu dây L298N driver, và thay đổi tốc độ của nó bằng lập trình Arduino. Tập trung vào linear actuator không có phản hồi, dự án Arduino đơn giản này giúp bạn xây dựng hệ thống tự động hóa thông minh. Giờ đây bạn có thể sử dụng những kỹ năng này để tạo ra các dự án điều khiển chuyển động của riêng mình với Arduino UNO R4!
Bài hướng dẫn liên quan
📱 Ứng dụng đề xuất
 English for KidsHọc tiếng Anh vui nhộn cho trẻ nhỏ.Tải về trênGoogle PlayTải về trênApp Store
English for KidsHọc tiếng Anh vui nhộn cho trẻ nhỏ.Tải về trênGoogle PlayTải về trênApp Store Bubble NoteGhi chú tự xóa — viết như nhắn tin.Tải về trênGoogle PlayTải về trênApp Store
Bubble NoteGhi chú tự xóa — viết như nhắn tin.Tải về trênGoogle PlayTải về trênApp Store Tôi Không MuaĐánh bại mua sắm bốc đồng, tiết kiệm hơn.Tải về trênGoogle PlayTải về trênApp Store
Tôi Không MuaĐánh bại mua sắm bốc đồng, tiết kiệm hơn.Tải về trênGoogle PlayTải về trênApp Store Con Đường Tri ThứcBài thi thử để học mọi thứ.Tải về trênGoogle PlayTải về trênApp Store
Con Đường Tri ThứcBài thi thử để học mọi thứ.Tải về trênGoogle PlayTải về trênApp Store