Arduino WebSlider Example Hướng dẫn Giao diện Điều khiển Dual Slider
Tổng quan
Ví dụ WebSlider cung cấp hai điều khiển slider độc lập có thể truy cập qua trình duyệt web. Được thiết kế cho Arduino Uno R4 WiFi và DIYables STEM V4 IoT - nền tảng giáo dục với khả năng analog nâng cao, tính năng điều khiển chính xác, và các module giáo dục tích hợp để học PWM và điện tử analog. Mỗi slider cung cấp giá trị từ 0-255, làm cho chúng hoàn hảo cho điều khiển PWM, điều chỉnh độ sáng, điều khiển tốc độ động cơ, và bất kỳ ứng dụng nào yêu cầu giá trị điều khiển tương tự analog.
Tính năng
- Dual Sliders: Hai điều khiển slider độc lập (mỗi slider có phạm vi 0-255)
- Giá trị Thời gian Thực: Cập nhật giá trị tức thì qua giao tiếp WebSocket
- Tương thích PWM: Giá trị 8-bit (0-255) hoàn hảo cho các hàm analogWrite()
- Phản hồi Trực quan: Hiển thị giá trị thời gian thực cho mỗi slider
- Nút Preset: Truy cập nhanh đến các giá trị thông dụng
- Hỗ trợ Cảm ứng & Chuột: Hoạt động trên máy tính, tablet và thiết bị di động
- Thiết kế Responsive: Thích ứng với các kích thước màn hình khác nhau
- Duy trì Giá trị: Sliders nhớ vị trí cuối khi trang reload
- Mở rộng Nền tảng: Hiện được triển khai cho Arduino Uno R4 WiFi, nhưng có thể mở rộng cho các nền tảng phần cứng khác. Xem DIYables_WebApps_ESP32
Phần cứng cần thiết
| 1 | × | Arduino UNO R4 WiFi | Amazon | |
| 1 | × | Alternatively, DIYables STEM V4 IoT | Amazon | |
| 1 | × | Alternatively, DIYables STEM V4B IoT | Amazon | |
| 1 | × | (Tùy chọn) DIYables STEM V4 IoT | Amazon | |
| 1 | × | Cáp USB Type-C | Amazon | |
| 1 | × | (Khuyến nghị) Screw Terminal Block Shield for Arduino UNO R4 | Amazon | |
| 1 | × | (Khuyến nghị) Sensors/Servo Expansion Shield for Arduino UNO R4 | Amazon | |
| 1 | × | (Khuyến nghị) Breadboard Shield for Arduino UNO R4 | Amazon | |
| 1 | × | (Khuyến nghị) Enclosure for Arduino UNO R4 | Amazon | |
| 1 | × | (Khuyến nghị) Power Splitter for Arduino UNO R4 | Amazon | |
| 1 | × | (Khuyến nghị) Prototyping Base Plate & Breadboard Kit for Arduino UNO | Amazon |
Or you can buy the following kits:
| 1 | × | DIYables STEM V4 IoT Starter Kit (Arduino included) | Amazon | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) | Amazon |
Hướng dẫn Thiết lập
Các bước nhanh
Thực hiện theo các hướng dẫn từng bước:
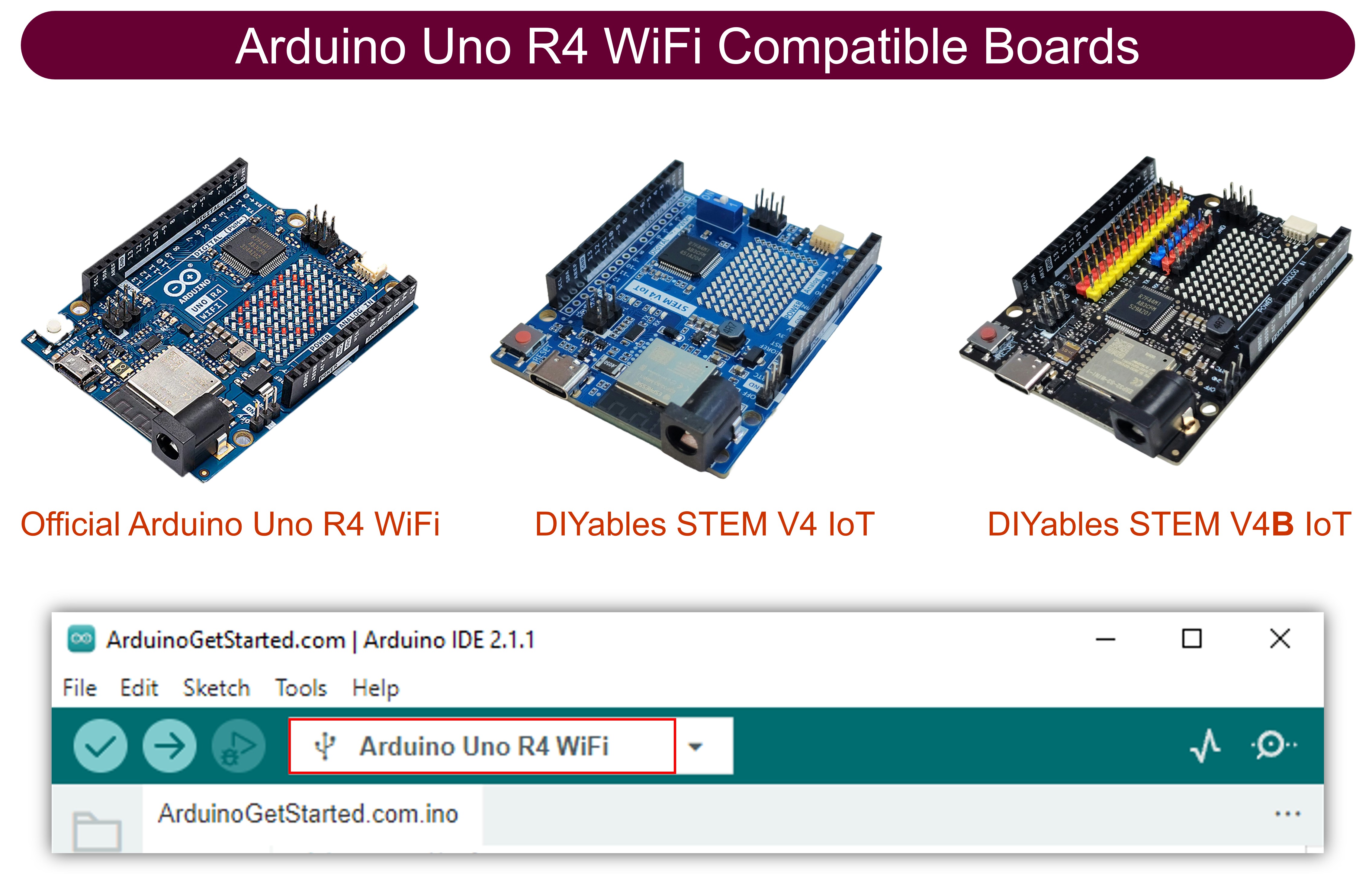
- Mới sử dụng Arduino Uno R4 WiFi/DIYables STEM V4 IoT? Hãy bắt đầu với hướng dẫn Arduino UNO R4 - Cài Đặt Phần Mềm để học các kiến thức cơ bản trước.
- Kết nối bo mạch Arduino Uno R4/DIYables STEM V4 IoT với máy tính của bạn bằng cáp USB.
- Khởi động Arduino IDE trên máy tính của bạn.
- Chọn bo mạch Arduino Uno R4 phù hợp (ví dụ: Arduino Uno R4 WiFi) và cổng COM.
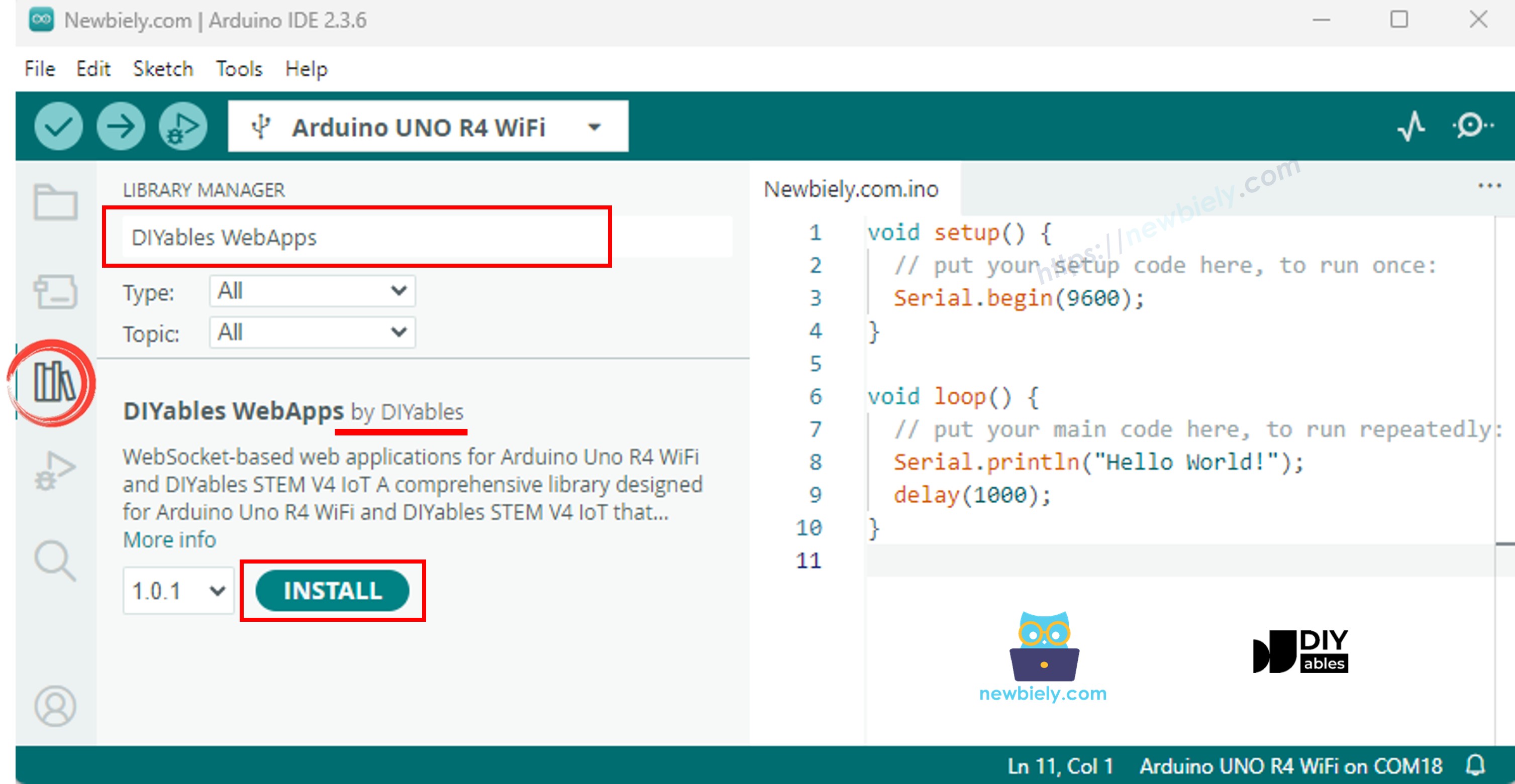
- Điều hướng đến biểu tượng Libraries ở thanh bên trái của Arduino IDE.
- Tìm kiếm "DIYables WebApps", sau đó tìm thư viện DIYables WebApps của DIYables
- Nhấn nút Install để cài đặt thư viện.
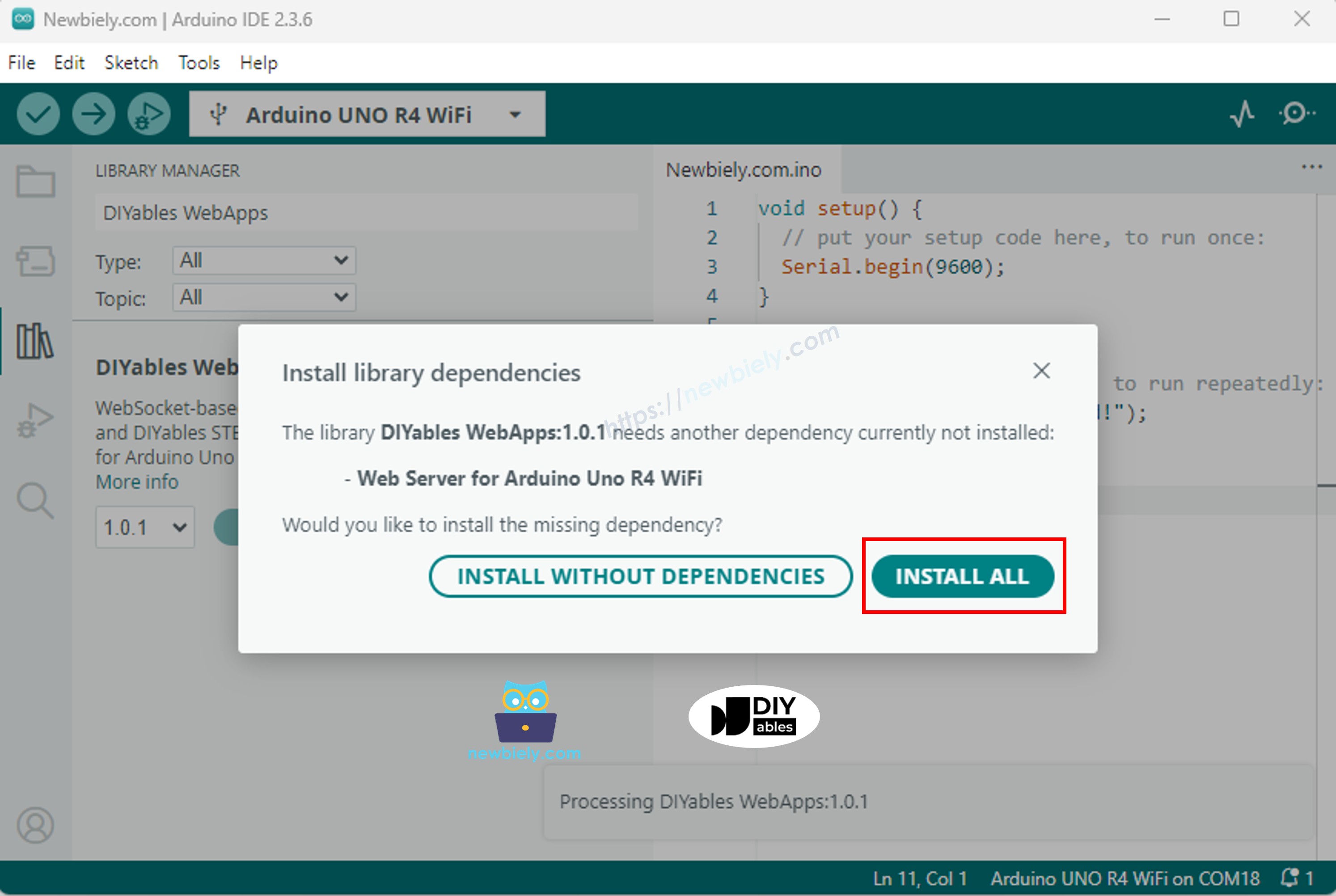
- Bạn sẽ được yêu cầu cài đặt một số thư viện phụ thuộc khác
- Nhấn nút Install All để cài đặt tất cả các thư viện phụ thuộc.
- Trên Arduino IDE, đi đến File Examples DIYables WebApps WebSlider example, hoặc copy code trên và dán vào editor của Arduino IDE
- Cấu hình thông tin đăng nhập WiFi trong code bằng cách cập nhật các dòng này:
- Nhấn nút Upload trên Arduino IDE để upload code lên Arduino UNO R4/DIYables STEM V4 IoT
- Mở Serial Monitor
- Kiểm tra kết quả trên Serial Monitor. Nó sẽ trông như thế này
- Nếu bạn không thấy gì, hãy khởi động lại bo mạch Arduino.
- Ghi nhớ địa chỉ IP hiển thị, và nhập địa chỉ này vào thanh địa chỉ của trình duyệt web trên smartphone hoặc PC của bạn.
- Ví dụ: http://192.168.0.2
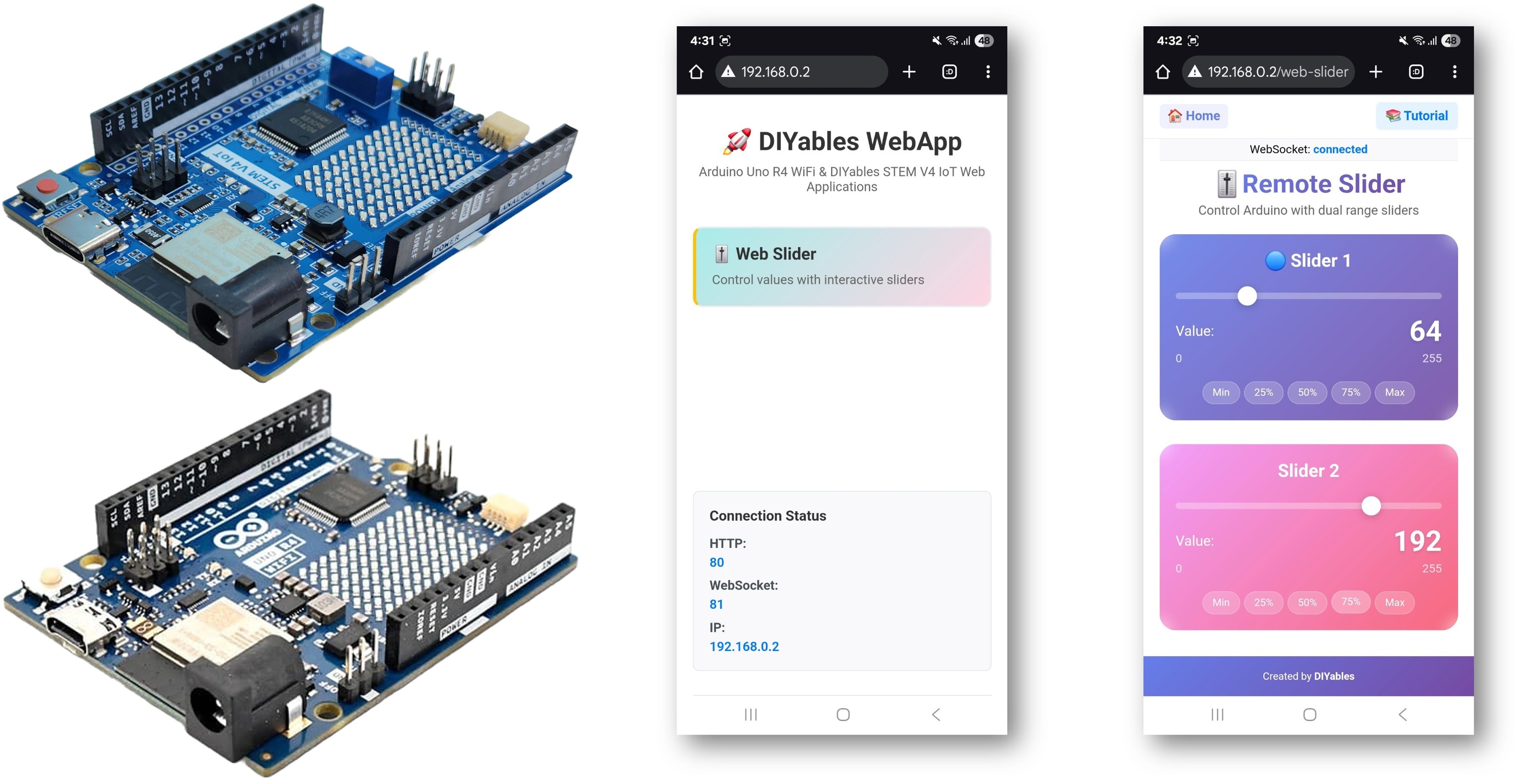
- Bạn sẽ thấy trang chủ như hình dưới đây:
- Nhấn vào link Web Slider, bạn sẽ thấy giao diện của ứng dụng Web Slider như hình dưới:
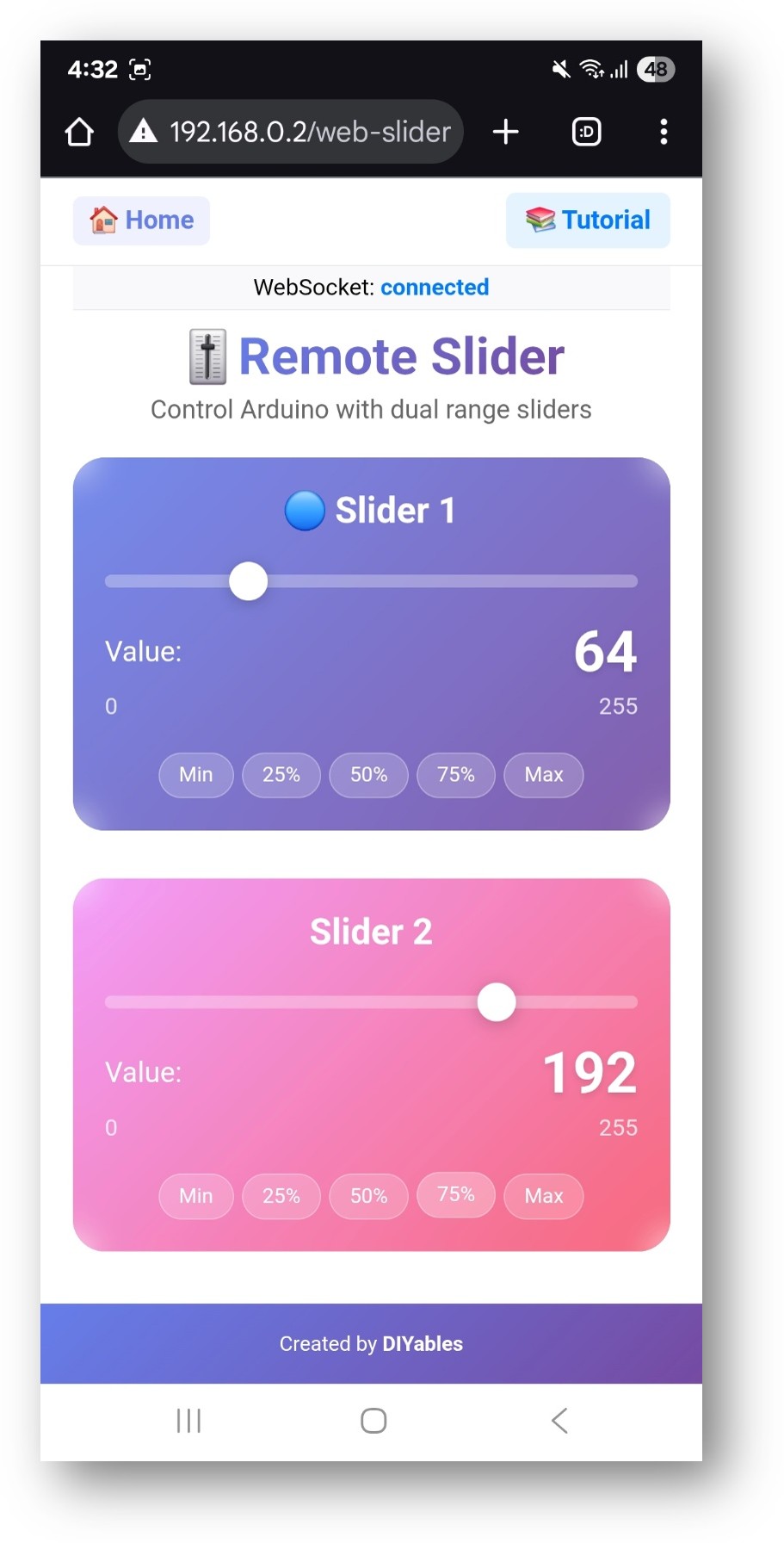
- Hoặc bạn cũng có thể truy cập trang trực tiếp bằng địa chỉ IP theo sau bởi /web-slider. Ví dụ: http://192.168.0.2/web-slider
- Thử di chuyển hai slider để điều khiển các giá trị analog (0-255) và quan sát phản hồi thời gian thực trong Serial Monitor.
Tùy chỉnh Sáng tạo - Điều chỉnh Code cho Dự án của bạn
Đặt Giá trị Mặc định cho Slider
Cấu hình vị trí ban đầu của slider:
Cách Sử dụng Sliders
Điều khiển Giao diện Web
Giao diện slider cung cấp:
- Slider 1: Slider điều khiển đầu tiên với hiển thị giá trị (0-255)
- Slider 2: Slider điều khiển thứ hai với hiển thị giá trị (0-255)
- Hiển thị Giá trị: Giá trị số thời gian thực cho cả hai slider
- Nút Preset: Truy cập nhanh đến các giá trị thông dụng (0%, 25%, 50%, 75%, 100%)
Vận hành Sliders
Máy tính (Điều khiển chuột)
- Nhấn và Kéo: Nhấn vào tay cầm slider và kéo để điều chỉnh giá trị
- Nhấn Vị trí: Nhấn bất kỳ đâu trên track slider để nhảy đến giá trị đó
- Điều khiển Tinh: Sử dụng chuyển động chuột nhỏ để điều chỉnh chính xác
Di động/Tablet (Điều khiển cảm ứng)
- Chạm và Kéo: Chạm tay cầm slider và kéo đến vị trí mới
- Chạm Vị trí: Chạm trên track slider để đặt giá trị
- Điều khiển Mượt: Kéo bằng ngón tay cung cấp thay đổi giá trị mượt mà
Phạm vi Giá trị
Mỗi slider cung cấp:
- Giá trị Tối thiểu: 0 (0% - tắt hoàn toàn)
- Giá trị Tối đa: 255 (100% - cường độ tối đa)
- Độ phân giải: 256 bước rời rạc (độ chính xác 8-bit)
- Tương thích PWM: Sử dụng trực tiếp với hàm analogWrite()
Ví dụ Lập trình
Handler Slider Cơ bản
Điều khiển Độ sáng LED
Điều khiển Vị trí Servo
Điều khiển Tốc độ Động cơ
Điều khiển Màu LED RGB
Kỹ thuật Lập trình Nâng cao
Làm mịn Giá trị
Điều khiển dựa trên Ngưỡng
Hệ thống Giá trị Preset
Ví dụ Tích hợp Phần cứng
Điều khiển Dải LED
Điều khiển Tốc độ Quạt
Điều khiển Âm lượng Audio
Khắc phục Sự cố
Các vấn đề Thường gặp
1. Sliders không phản hồi
- Kiểm tra kết nối WebSocket trong console của trình duyệt
- Xác minh kết nối mạng giữa thiết bị và Arduino
- Refresh trang trình duyệt để reset kết nối
- Kiểm tra Serial Monitor để tìm lỗi kết nối
2. Giá trị không đạt phạm vi đầy đủ
- Xác minh cài đặt phạm vi slider trong giao diện web
- Kiểm tra vấn đề ánh xạ giá trị trong hàm callback
- Kiểm tra với các trình duyệt hoặc thiết bị khác nhau
3. Điều khiển giật hoặc không ổn định
- Triển khai làm mịn giá trị cho thay đổi dần dần
- Kiểm tra vấn đề độ trễ mạng
- Thêm debouncing cho thay đổi giá trị nhanh
4. Output PWM không hoạt động
- Xác minh chân hỗ trợ PWM (kiểm tra sơ đồ chân Arduino)
- Đảm bảo analogWrite() được gọi với số chân chính xác
- Kiểm tra kết nối phần cứng và yêu cầu tải
Bài hướng dẫn liên quan
📱 Ứng dụng đề xuất
 English for KidsHọc tiếng Anh vui nhộn cho trẻ nhỏ.Tải về trênGoogle PlayTải về trênApp Store
English for KidsHọc tiếng Anh vui nhộn cho trẻ nhỏ.Tải về trênGoogle PlayTải về trênApp Store Bubble NoteGhi chú tự xóa — viết như nhắn tin.Tải về trênGoogle PlayTải về trênApp Store
Bubble NoteGhi chú tự xóa — viết như nhắn tin.Tải về trênGoogle PlayTải về trênApp Store Tôi Không MuaĐánh bại mua sắm bốc đồng, tiết kiệm hơn.Tải về trênGoogle PlayTải về trênApp Store
Tôi Không MuaĐánh bại mua sắm bốc đồng, tiết kiệm hơn.Tải về trênGoogle PlayTải về trênApp Store Con Đường Tri ThứcBài thi thử để học mọi thứ.Tải về trênGoogle PlayTải về trênApp Store
Con Đường Tri ThứcBài thi thử để học mọi thứ.Tải về trênGoogle PlayTải về trênApp Store