Arduino Động cơ
Chúng ta sẽ học:
- Các loại động cơ nào có thể sử dụng với Arduino
- Những khác biệt giữa các loại động cơ là gì
- Cách điều khiển từng loại động cơ
Các loại động cơ
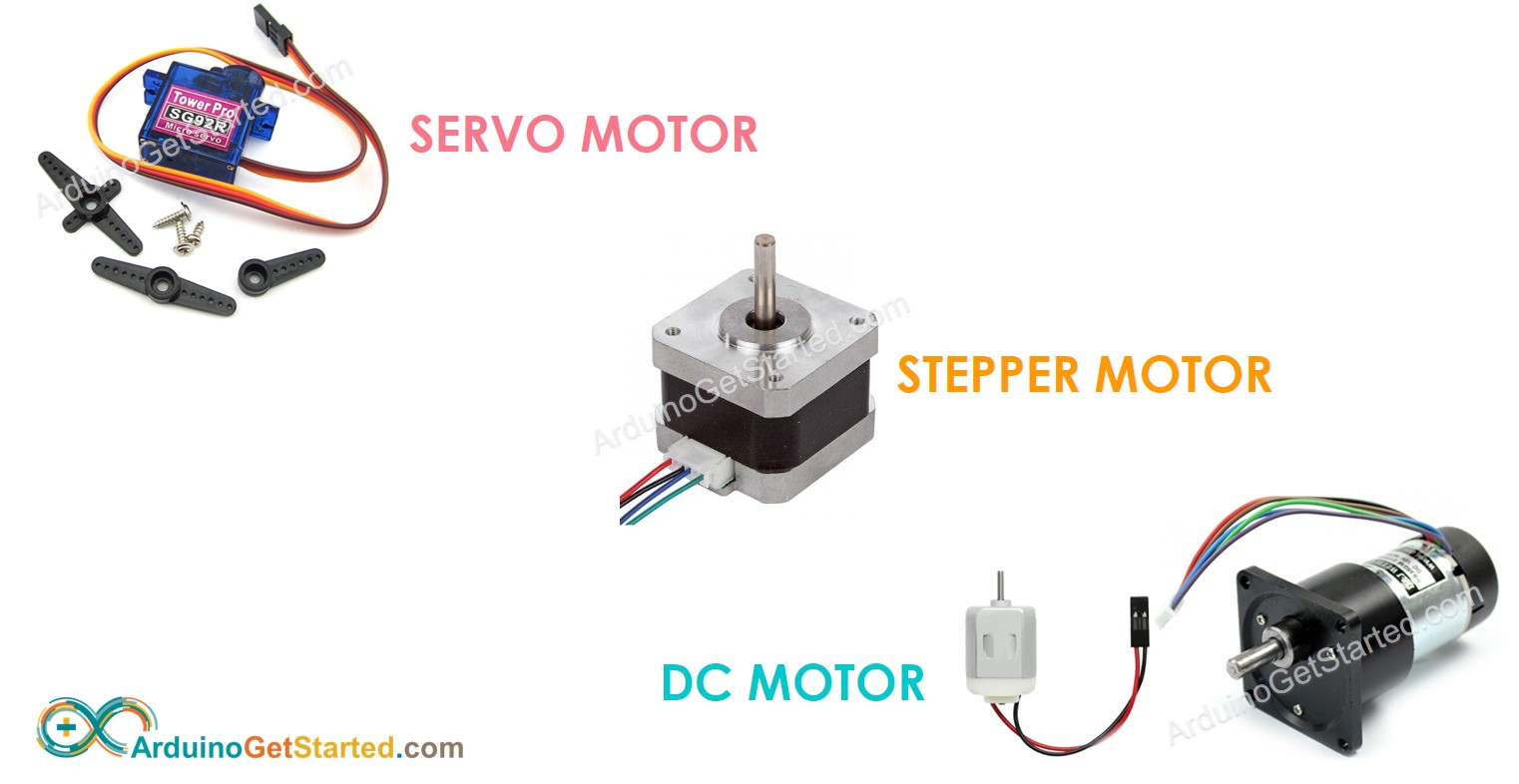
Có ba loại động cơ được sử dụng rộng rãi với Arduino:
- Động cơ servo
- Động cơ bước
- Động cơ một chiều
Động cơ servo có hai loại chính: động cơ servo 180° và động cơ servo 360°. Trên thực tế, hầu hết mọi người hiểu ngầm "động cơ servo" là "động cơ servo 180°".
Động cơ servo 360° tương tự động cơ DC, ngoại trừ việc không cần driver phần cứng.
Động cơ servo 180 độ
Các đặc điểm
- Vòng quay bị giới hạn trong khoảng từ 0° đến 180°
- Hướng quay: theo chiều kim đồng hồ, ngược chiều kim đồng hồ
- Vị trí quay: có thể điều khiển để quay tới một góc cụ thể trong khoảng từ 0° đến 180°
- Tốc độ quay: có thể điều khiển, nhưng không mượt mà
- Driver phần cứng bổ sung: KHÔNG cần. Chỉ điều khiển trực tiếp từ một chân Arduino
- Nguồn cấp bổ sung: bắt buộc
- Cách điều khiển: dễ dàng, chỉ cần sử dụng tín hiệu PWM
Ứng dụng
- Bất kỳ ứng dụng nào chỉ cần xoay một góc từ 0° đến 180°
Hướng dẫn động cơ servo
Động cơ bước
Đặc điểm
- Quay vô hạn
- Hướng quay: theo chiều kim đồng hồ, ngược chiều kim đồng hồ
- Vị trí quay: có thể được điều khiển để quay chính xác tới bất kỳ góc độ nào.
- Tốc độ quay: có thể được điều khiển chính xác. Hơn nữa, gia tốc và giảm tốc có thể được điều khiển chính xác
- Driver phần cứng bổ sung: cần thiết
- Nguồn cấp phụ: cần thiết
- Cách điều khiển: phức tạp, người mới nên dùng thư viện
Ứng dụng
- Tự động hóa và robot
- Máy in, máy in 3D, CNC, máy vẽ X-Y,
- Máy pha chế cocktail
Hướng dẫn động cơ bước
Động cơ điện một chiều
Các đặc điểm
- Quay không giới hạn
- Hướng quay: theo chiều kim đồng hồ, ngược chiều kim đồng hồ
- Vị trí quay: rất khó quay chính xác đến một góc cụ thể
- Tốc độ quay: dễ kiểm soát tốc độ, nhưng rất khó kiểm soát chính xác để đạt được một giá trị tốc độ cụ thể
- Bộ điều khiển phần cứng bổ sung: bắt buộc
- Nguồn cấp bổ sung: bắt buộc
- Cách điều khiển: dễ, chỉ cần dùng tín hiệu PWM có điện áp cao
※ Lưu ý:
- Để điều khiển vị trí của động cơ DC, chúng ta cần phần cứng bổ sung gọi là encoder, và sau đó sử dụng phương pháp điều khiển vòng kín như PID. Điều này rất khó đối với người mới bắt đầu.
- Đối với điều khiển tốc độ, chúng ta có thể dễ dàng kiểm soát mức độ nhanh của nó, như chậm, trung bình, nhanh, rất nhanh, hay bao nhiêu phần trăm của tốc độ tối đa. Tuy nhiên, để kiểm soát số vòng trên một giây, ta cần phần cứng bổ sung gọi là encoder, và sau đó sử dụng phương pháp điều khiển vòng kín như PID. Điều này rất khó đối với người mới bắt đầu.
- Một số động cơ DC trên thị trường có encoder tích hợp sẵn
Ứng dụng
- Được sử dụng để điều khiển một thiết bị cần quay liên tục nhưng giá trị tốc độ không cần được xác định. Ví dụ: quạt, bơm, xe ô tô điều khiển từ xa (RC car), máy khoan ...
※ Lưu ý:
Có hai loại động cơ DC chính: động cơ DC có chổi than và động cơ DC không có chổi than. Động cơ DC có chổi than được sử dụng rộng rãi trong các dự án tự làm.
Hướng dẫn động cơ một chiều
Hướng dẫn chọn động cơ
Việc chọn một động cơ cho một dự án phụ thuộc vào nhiều yếu tố, chẳng hạn như trọng lượng mang theo, nguồn cấp điện, đặc điểm của ứng dụng...
- Nếu dự án của bạn cần quay tới vị trí góc nằm giữa 0° và 180°, hãy tìm một động cơ servo 180° phù hợp
- Nếu dự án của bạn cần quay chính xác tới bất kỳ vị trí nào, hãy tìm một động cơ bước phù hợp
- Nếu dự án của bạn cần quay liên tục chính xác mà không có bất kỳ vị trí nào, hãy tìm một động cơ DC hoặc động cơ servo 360° phù hợp
Mua xe máy
Tiết lộ: Một số liên kết trong bài viết này là liên kết tiếp thị Amazon và có thể nhận hoa hồng theo chính sách của chương trình.
Bài hướng dẫn liên quan
📱 Ứng dụng đề xuất
 English for KidsHọc tiếng Anh vui nhộn cho trẻ nhỏ.Tải về trênGoogle PlayTải về trênApp Store
English for KidsHọc tiếng Anh vui nhộn cho trẻ nhỏ.Tải về trênGoogle PlayTải về trênApp Store Bubble NoteGhi chú tự xóa — viết như nhắn tin.Tải về trênGoogle PlayTải về trênApp Store
Bubble NoteGhi chú tự xóa — viết như nhắn tin.Tải về trênGoogle PlayTải về trênApp Store Tôi Không MuaĐánh bại mua sắm bốc đồng, tiết kiệm hơn.Tải về trênGoogle PlayTải về trênApp Store
Tôi Không MuaĐánh bại mua sắm bốc đồng, tiết kiệm hơn.Tải về trênGoogle PlayTải về trênApp Store Con Đường Tri ThứcBài thi thử để học mọi thứ.Tải về trênGoogle PlayTải về trênApp Store
Con Đường Tri ThứcBài thi thử để học mọi thứ.Tải về trênGoogle PlayTải về trênApp Store